中低速磁浮交通因为具有低噪声、爬坡能力强、转弯半径小、与城市地形兼容性好等优点,已经成为发展公共轨道交通的重要可选方案。中低速磁浮交通采用F型轨道,车辆下部的悬浮电磁铁与F轨构成闭合磁路,它与轨道之间的电磁吸力垂向分量实现车辆无接触支撑,车辆过弯道或受侧向力影响时,电磁铁与轨道之间产生的电磁吸力水平分量形成被动导向力,从而实现车辆无接触的导向。车辆与轨道之间的关系如图1所示,车辆“抱轨”贴地运行,悬浮高度仅为8mm左右。
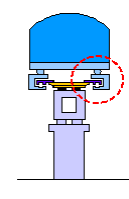
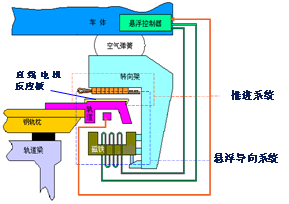
图1 车辆与轨道的相互关系及走行部部分细节组成
一、F轨的构成、作用及其几何参数检测项目
与传统轮轨交通的轨道有着明显不同,中低速磁浮轨道主要包括水泥梁和轨排两部分,其中两根 F 型钢轨通过工字形轨枕连接组成轨排。另外值得注意的是,F 轨外端面与轨道平面不是垂直的,而是成一个锐角,它影响轨道部分参数测量。如图2、3所示,F轨由F形型钢和铝制反应板组成,它与电磁铁一起形成闭合磁路,承受着来自电磁铁的悬浮力和导向力。它作为直线牵引电机的次级,与车载电机的短初级作用共同产生推进力;它也是机械制动作用的制动面;当悬浮控制失效时,可以作为应急救援的液压支撑轮的导轨;当然,它也可以作为车辆落地时的着地滑块的支撑面。因此,F轨在中低速磁浮交通中扮演着重要角色,它的几何状态紧密地影响着车辆的稳定悬浮,影响着车辆运行的的安全性和舒适性,适当的轨道维护是保持良好轨道状态的手段之一,而轨道维护的基础是轨道几何参数测量。传统轮轨交通的轨道几何参数检测已开展数年,对轨道几何参数检测技术行了深入研究,目前,国内外的轨检车已经发展到第六代。但是传统轮轨交通的轨道检测技术很难直接用于磁浮交通。
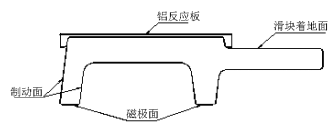
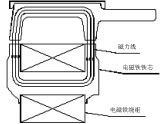
图2 F型轨断面 图3 导轨与电磁铁构成的闭合磁路
磁浮轨道几何参数检测项目主要有:高低、轨向、轨距、水平、错牙、轨缝以及超高等。高低是指左右 F 轨分别沿纵向的垂向偏差,有左高低和右高低之分。轨向是指左右F轨分别沿轨道纵向的横向偏差,也有左轨向和右轨向之分。高低和轨向是描述单股轨在空间分布上的表现出的变化,也可统称为不平顺。轨距指轨道断面左右轨两磁极间中心点的距离,用于描述左右两轨横向相对位置关系。水平指轨道断面左右两轨的高差,用于描述左右两轨垂向的相对位置关系的偏差。轨缝是指两段轨排之间的间距大小。超高是指曲线段处的左右 F 轨平面与水平之间形成的夹角或位移。与传统轮轨交通的轨道检测相比,磁浮轨道几何参数检测项目偏重于轨缝、错牙、高低、轨向以及F轨四磁极面直线度等检测。其中,四极面直线度是指左右F轨的四个磁极面应处于同一直线上,以减少对悬浮架形成滚动偏载。
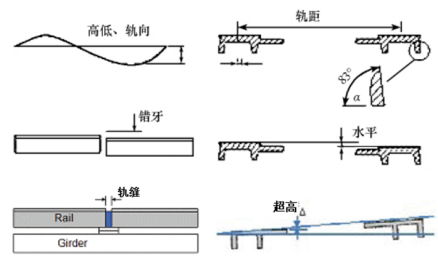
图4 F轨几何参数的主要检测项目
二、中低速磁浮交通F轨几何参数检测仪
参照传统轮轨轨道检测维护方式,中低速磁浮交通F轨的检测采用了动态轨检系统和便携式轨检仪相结合的方式,其中动态系统可直接搭载在快速运行的磁浮车辆上,对轨道几何参数实现快速基于惯性基准的检测,有效筛选和预警轨道参数超差路段,它亦可与一辆独立的车辆及相应的数据处理设备组合,形成磁浮轨道检测车;便携式轨检仪可以利用手推或自带动力遥控方式,以较低的走行速度,利用弦测法的原理实现轨道几何参数的检测,一般与动态轨检系统配合,实现对疑似超差路段进行再次检测确认,或在维护过程中对维护结果进行确认。根据应用的场合不同,轨检仪可以有H型和T型的结构。
2.1 H型轨检仪
它是一种人工推行在轨道安装面上行走的推车型检测设备,可一次性自动测量并实时记录轨道参数。为中低速磁浮轨道铺设施工中提供测量帮助,方便施工队伍在施工过程中及时修正存在的问题并加以改进。

图5 国防科大研制的第一版H型轨检仪

图6 北京中低速磁浮S1线的H型轨检仪
2.2 H型轨检仪的主要检测项目及指标
表1
|
检测项目 |
测量范围 |
精度 |
备注 |
|
|
里程 |
0-9999km |
±3‰ |
|
|
|
轨距 |
2205-2235mm |
±0.8mm |
|
|
|
水平 |
悬浮间隙检测面 |
±10 mm |
±1.5mm |
|
|
轨 向 |
±200mm |
±1.5mm |
10m弦 |
|
|
高低 |
悬浮间隙检测面 |
±10 mm |
±1.5mm |
10m弦 |
|
三角坑 |
悬浮间隙检测面 |
±30 mm |
±1.5mm |
3m弦 |
|
四点直线度 |
F轨四磁极 |
±3.0mm |
±0.8mm |
|
|
错牙 |
垂面差 |
±10mm |
±0.5mm |
|
2.3 T型轨检仪
它是一种自带动力、通过遥控操作自行进的轨道检测设备,在行进中自动检测单侧轨道,通过间接推导或掉头测量获得另一侧轨道参数,标准巡检速度为3.6km/h,电池续航能力4h。它是H型结构的一种简化变体,体积小,结构简单,拆装方便,是轨道日常巡检的必备设备。

图7 自带动力的T型轨检仪
2.4 T型轨检仪的主要检测项目及指标
表2
|
检测项目 |
测量范围 |
精度 |
备注 |
||
|
里程 |
0-9999km |
±3‰ |
|
||
|
轨距 |
2205-2235mm |
±0.8mm |
|
||
|
水平 |
悬浮间隙检测面 |
±10 mm |
±1.5mm |
|
|
|
轨 向 |
±200mm |
±1.5mm |
10m弦 |
||
|
高低 |
悬浮间隙检测面 |
±10 mm |
±1.5mm |
10m弦 |
|
|
三角坑 |
悬浮间隙检测面 |
±30 mm |
±1.5mm |
3m弦 |
|
|
错牙 |
垂面差 |
±10mm |
±0.5mm |
||
根据功能及其载体不同,F轨几何参数动态检测系统共分为三部分:一是搭载在列车上的测量系统,它由测量架、传感器组以及记录仪等组成,主要完成对轨道状态数据采集和记录;二是地面处理系统,包括一台计算机和一套处理软件,软件由数据处理系统以及应用管理系统组成,自动完成数据处理、用户编辑,报表报告生成,数据共享等;三是绝对里程标识板,采用无损方式安装在轨道上,为动态轨检系统提供里程校准的基点。三、中低速磁浮F轨几何参数动态检测系统
测量系统搭载在中低速磁浮列车上,能够在列车运行中对F轨和接触轨的几何参数进行在线式实时检测、分析、记录、存储,为日常维护和定期检修提供依据。F轨几何参数包括高低、水平、错牙、轨距以及轨向等;接触轨几何参数主要有高低、轨距以及磨耗。基本检测方法是非接触式惯性基准法。另外,也可增加摄像头,形成视觉巡检系统,可人工查找轨道其它故障。

图8 中低速磁浮F轨动态检测系统的测量系统

图9 中低速磁浮F轨动态测量系统搭载在车辆上

图10 地面信息处理系统

图11 绝对里程标识板
3.1 主要检测项目及指标
表3
|
项目 |
检测项目 |
测量范围 |
精度 |
备注 |
|
|
1 |
里程 |
0-9999km |
±3‰ |
|
|
|
2 |
轨距 |
2205-2235mm |
±0.3mm |
|
|
|
3 |
水平 |
悬浮间隙检测面 |
±300 mm |
±1.0mm |
|
|
4 |
轨 向 |
±30mm |
±1.0mm |
|
|
|
5 |
高低 |
悬浮间隙检测面 |
±30 mm |
±0.7mm |
|
|
6 |
三角坑 |
悬浮间隙检测面 |
±30 mm |
±0.7mm |
3m弦 |
|
7 |
错牙 |
垂面差 |
±10mm |
±0.2mm |
|
|
8 |
接触轨高低 |
额定值700mm |
±8mm |
±1.5mm |
|
|
9 |
接触轨水平 |
额定值60mm |
±6mm |
±1mm |
|
|
10 |
接触轨磨耗 |
|
8mm |
±1mm |
|
国防科技大学磁浮技术中心 吴 峻